TECHNOLOGY
The Hi-Def stereoscopic vision system in the ARTAS Robot utilizes artificial intelligence algorithms to locate the most viable hair follicles (grafts) for harvesting purposes.
The Hi-Def stereoscopic vision system in the ARTAS Robot utilizes artificial intelligence algorithms to locate the most viable hair follicles (grafts) for harvesting purposes.

The Hi-Def stereoscopic vision system in the ARTAS Robot utilizes artificial intelligence algorithms to locate the most viable hair follicles (grafts) for harvesting purposes.

The harvesting process is performed with speed and accuracy while preserving the natural look of the donor area without compromising it.

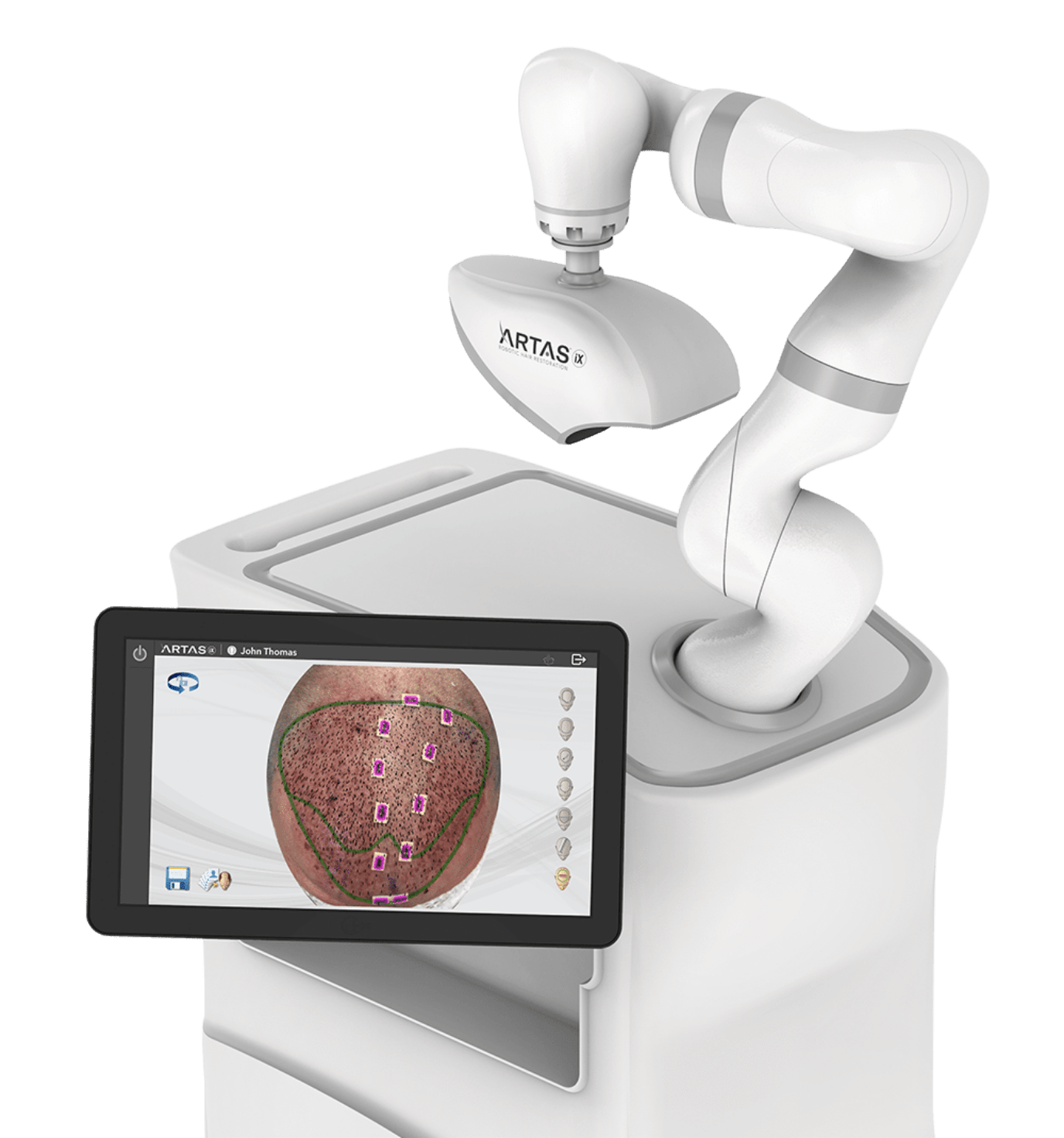
The surgeon and Robot collaborate to design a hair line that is appropriate for the patient’s face, head and structure.

Recipient sites are intelligently made by the Robot and/or Surgeon with the objective of avoiding shock loss or damage to existing hair follicles.

The robot then places the grafts into the Recipient Sites. The Surgeon and Robotic Techs ensure that all of the above Steps including placement are properly executed.